|
Least Squares
[��úѭ���������ͧ�����ѧ�֡��]
����ѡ���˹�觷�������� DSP ������������տѧ���蹵�����ͧ 2 �ѧ���� f(t) �Ѻ f̂(c,t) ����� c ����繿ѧ���蹢ͧ t ���������͡ c ������� f̂(c,t) �繡�û���ҳẺ least-squares �ͧ f(t) 㹪�ǧ t1 �֧ t2 ���� total squared error (TSE) ����դ�ҵ�������
����������
���դ�ҵ���ش
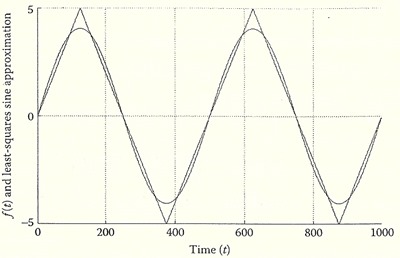
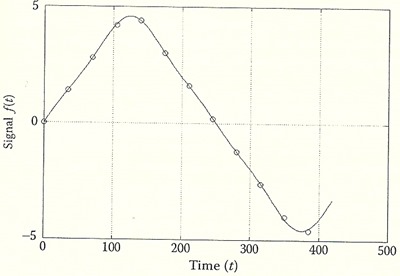
������ҧ�ٻ��ҹ��ҧ f(t) �繤��������������դҺ = 500 ��о��͵㹪�ǧ t1 = 0 �֧ t2 = 1000 �ա�ѧ����˹�� f̂(c,t) = c sin(2πt/500) ������͡��� c ��� TSE ����ش ��ҡѺ��Ҿٴ��� f̂(c,t) �繡�û���ҳẺ least-squares �ͧ f(t) 㹪�ǧ [t1, t2] = [0, 1000]
�ó��ѭ�ҳ��������ͧ f(t) �С������ǡ�������� elements �������� N ��� f = [f1 f2 ··· fN] �������� TSE ����¹��
����������
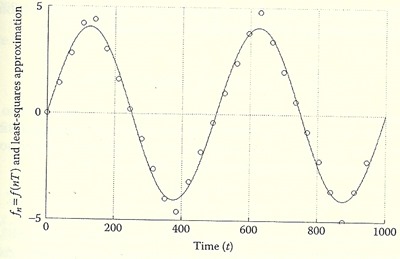
����� fn ��� element ��� n �ͧ f ��� T ��� time step ���ͪ�ǧ�����ҧ������ ������ҧ�ٻ��ҹ��ҧ��͡ó���������ͧ�ͧ�ٻ����� T = 35, N = 28
��� f̂(c,t) �繿ѧ�����ԧ��鹢ͧ c �� f̂(c,t) = c1 + c2t + c3t2 + ... + cMtM-1 ��Ҩ����¡����繡�û���ҳẺ least-squares ������ԧ��� (linear least-squares approximation) 㹡óմѧ����� �տѧ������ٻ tm (��Ңͧ m ������ҡ 0) ���� M �ѧ���� ������ gm(t) �繿ѧ���蹢ͧ t �ѧ���蹷�� m ��Ҩ���¹ gmn = gm(nT) ᷹��Ңͧ gm(t) ��� t = nT �й��
����������f̂(c,nT) = c1g1n + c2g2n + c3g3n + ... + cMgMn
���
����������
���䢷������ TSE ����ش���
����������
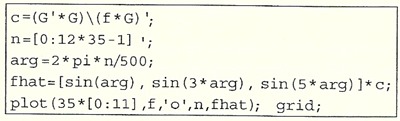
���������� M ����÷���ͧ���͡���������ǡ���� least-squares coefficient ���� c = [c1 c2 ··· cM]′, ���Ẻ���ʹ㨡�èѴ�ٻ�ҧ��Ե��ʵ��Ф�Ѻ ��Ҩ��� c = (G′*G)∖(f*G)′ ����� G = [G′1 G′2 ··· G′M], Gm = [gm1 gm2 ··· gmN], f = [f1 f2 ··· fN], '*' ᷹ ��äٳ�ǡ����, '′' ᷹ transpose ��� '∖' ��� ��Ǵ��Թ��÷����ش�ͧ������ԧ��� �� ��� B = A∖C ���� A*B = C
�ͧ�Ҵٵ�����ҧ�ѹ �ҡ�ٻ�� ���͡�� 12 ������ ������ҧ�� f = [f1 f2 ··· fN] ��� N = 12 �� f = [0.0 1.4 2.8 4.2 4.4 3.0 1.6 0.2 -1.2 -2.6 -4.0 -4.6] ���ǹ�� f̂(c,t) ��Ҩ��������ѧ���� sine �������������ٻ���� ����������ͧ sine ������᷹
����������f̂(c,t) = c1sin(2πnT/500) + c2sin(6πnT/500) + c3sin(10πnT/500)
����� n = 0..11, gmn = sin(2π(2m-1)nT/500) �й�� ����ԡ�� G �� 3 ��ѡ (M = 3) ��� 12 �� (N = 12) �� MATLAB ���仹�������ҧ G
��ѧ�ҡ�� G12x3 ��ҡ�ӹdz�� c �����ٵä�Ѻ
�����: ��Ǣ�� 2.2 Least Squares ˹ѧ��� Digital Signal Processing with Examples in MATLAB �ͧ S. D. Stearns �Ѻ D. R. Hush
| Create Date : 28 �á�Ҥ� 2556 | | |
| Last Update : 28 �á�Ҥ� 2556 16:33:55 �. |
| Counter : 1990 Pageviews. |
| |
|
 |
|
|
|
Correlation
[��úѭ���������ͧ�����ѧ�֡��]
correlation �繡���Ѵ�����͡��� waveform (���� image) �ͧ�ѹ� � �դ��������ѹ���˹, autocorrelation �к͡��� waveform ������� t �����Ѻ����ѹ�ͧ������� t+τ ���˹ (�����Ҿ�����˹� (x,y) �Ѻ�Ҿ���ǡѹ�����˹� (x+σ, y+σ))
��� x(t) ��� y(t) �� waveform �ͧ�ѹ�������㹪�ǧ t = [0,∞) (���¤������ �ѭ�ҳ�١������ҡ lower limit �֧�� upper limit) �ѧ���� correlation �ͧ x ��� y ���
����������
����� τ ≥ 0 ��� E[·] ᷹��ҤҴ�������ͤ�������, ����Ѻ�ó� waveform ��������ͧ ˹�ҵ�����è�����¹���
����������
����� m ≥ 0 �� time shift �˹���������
�ҡ����� ������ correlation �繼Ťٳ����¢ͧ�ѭ�ҳ�ͧ�ѭ�ҳ ��觼Ťٳ�١�����������բͺࢵ�� �й�� ��Һ��ҷ�� time shift �繺ǡ ��ҡ�����ͧ�ѧ�šѺ end effects ���� waveform �١�����㹪�ǧ�ӡѴ [0, NT] ��Ҩ�����������������ҹ 2 ��͵��仹���Ѻ
����������1. �͡��ǧ [0, NT] ������ѭ�ҳ ���;ٴ��� ��Ңͧ�ѭ�ҳ��ҡѺ�ٹ��
����������2. �ѭ�ҳ���ѡɳ��繤Һ ���Һ = NT
������ҧ correlation �ͧ waveform x �Ѻ y �ʴ��ѧ�ٻ, x(t) ���ѭ�ҳ���������� ��� y(t) ������������ �� MATLAB ��ҹ��ҧ�ӹdz φxy(m) �¢��¤Һ�ͧ y (yy = [y,y]) ������ yn+m ��ش�ͺ�ǡ����Ф�Ѻ
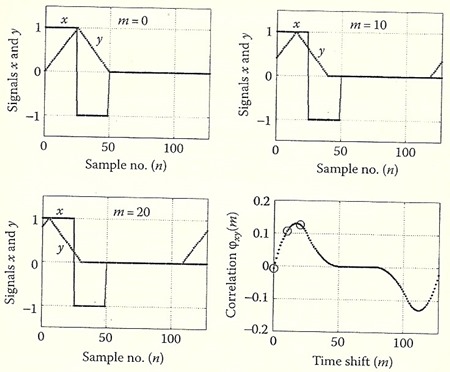
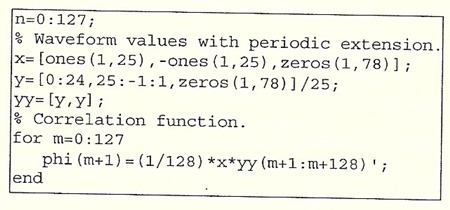
��ҿ�ʴ��ѭ�ҳ x, y �ó� m = 0, m = 10 ��� m = 20 ��� xn ��������� ��� yn+m (��觢�������� yy) ����价ҧ���� �� o 㹡�ҿ φxy(m) �ʴ� correlation �ͧ��� 3 �óմѧ�����
correlation detection �繵�����ҧ����� correlation 㹧ҹ�����ż��ѭ�ҳ �ٻ��ҹ��ҧ�ʴ� target signal ��� target signal ������ noise ��� 1000 �Ѻ 3700 ��觶���ͧ���ٻ��ҧ�ٻ���� ����Ҩ�͡����������¤�Ѻ����� target signal ����ç���˹� 1000 �Ѻ 3700 �� ����ҡ�����ö��Ǩ�Ѻ target signal ��������� correlation �����ҧ target signal �Ѻ target signal + noise
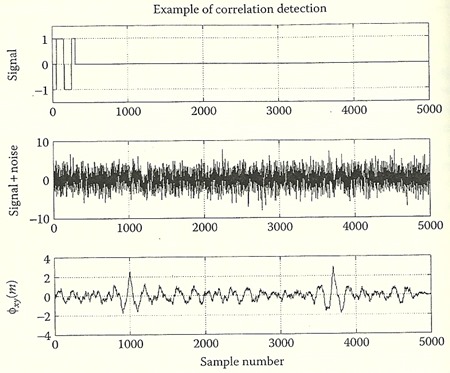
�����: ��Ǣ�� 3.2 Correlation ˹ѧ��� Digital Signal Processing with Examples in MATLAB �ͧ S. D. Stearns �Ѻ D. R. Hush
| Create Date : 27 �á�Ҥ� 2556 | | |
| Last Update : 27 �á�Ҥ� 2556 21:23:13 �. |
| Counter : 1670 Pageviews. |
| |
|
| |
|
|
|
Data-hiding Scheme for Digital-Audio in Amplitude Modulation Domain
[��úѭ���������ͧ�����ѧ�֡��]
�����ҵ��� ����ػ�ҡ������㹪������ǡѹ�ͧ Nhut Minh Ngo, Masashi Unoki, Ryota Miyauchi �Ѻ Yoiti Suzuki �ҡ 8th International Conference on Intelligent Information Hiding and Multimedia Signal Processing �� 2012 ��� Piraeus-Athens, Greece
�Ԥ����ç���ҧ��ѡ�����Ѻ (1) Method of Digital-Audio Watermarking Based on Cochlear Delay Characteristics, (2) Reversible Watermarking for Digital Audio Based on Cochlear Delay Characteristics, (3) Detection of Tampering in Speech Signals with Inaudible Watermarking Technique ���ᵡ��ҧ��͡�û���ء����ҹ��Ѻ �ش���ʧ��ͧ����������� ���ʹ��Ըա�ë������źҧ���ҧŧ��ѭ�ҳ����Ш�����§��ҹ�к��Է�� AM ����������Ѻ�ѧ�кҧ�������ҹ�鹷������ö�ʹ�����ŷ�������͡����
���ǹ�ͧ��ë������� (watermarking) ��Ẻ������ (���ԧ���� 3 ����˹���á) ��ѧ�ҡ��鹨֧��� x(n) �Ѻ y(n) 仼�ҹ double modulation ���͡�ҡ�� ��ǹ�Ҥ�Ѻ ����Ѻ�ѭ�ҳ�Ҽ�ҹ double demodulation ��������� x̂(n) �Ѻ ŷ(n) ���ǡ�����ѭ�ҳ����ͧ�Ҵ֧��¹�����͢����ŷ����͡������� (�к����֧��Ẻ non-blind watermarking ��Ѻ) �Ҿ����ʴ�� Figure 2. �Ѻ 3.
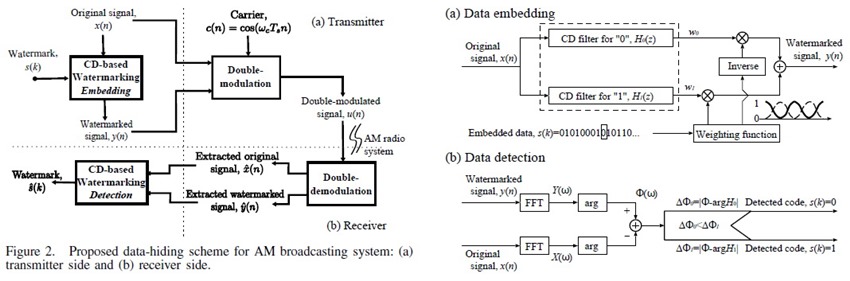
������������ǹ���ᵡ��ҧ�ҡ��������˹�ҹ� ��蹤�� ��鹵 double modulation �Ѻ demodulation ��� block diagrams �ͧ�ǡ�ѹ�ʴ��ѧ Figure 4. �Ѻ 5. ����ӴѺ
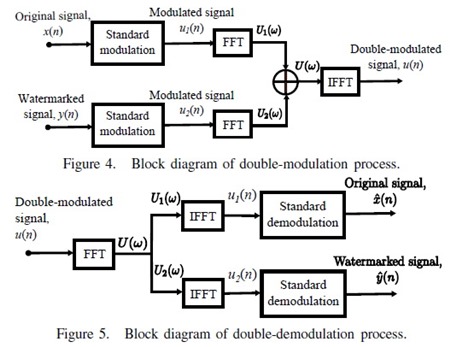
���ͧ standard modulation ��� AM technique �������к��Է�� AM Ẻ���Է���仹Ф�Ѻ ������ҡ �Ҥ modulation ������� x(n) ��� y(n) �����ǡ����� mod �Ѻ carrier ������ � �� u1(n) �Ѻ u2(n) ����ӴѺ �������Ҵ�������ͧ u1(n) �Ѻ u2(n) �� ��Ҩ������������ѹ�� sidebands 2 ��� ����-��Ңͧ�������ͧ���� carrier ���¡��觷���դ�������ӡ������ lower sideband ��н�觷���������٧������� upper sideband (�ѹ����繼ŷ���Դ��鹵�������ҵԢͧ AM) U1(ω) �Ѻ U2(ω) ��������ͧ u1(n) �Ѻ u2(n) �����Ҩ����͡��� lower sideband �ͧ U1(ω) �Ѻ upper sideband �ͧ U2(ω) ������ѹ�� U(ω) �����ŧ�Թ�����ʿ���������� u(n) �͡�ҡ�� ���ѹ������鹾Ը� double modulation ���ǹ demodulation ���������Ѻ (�� Figure 5.) ������ҡ������ͧ u(n) ��� U(ω) ������¡ lower sideband �������ҧ U1(ω) ��� upper sideband �������ҧ U2(ω) ����ŧ��駤����� IFFT ��� u1(n) �Ѻ u2(n) ����ӴѺ ��������� copy ��ǹ lower sideband �ͧ U1(ω) 价ҧ��� upper sideband �ͧ�ѹ ��� copy ��ǹ upper sideband �ͧ U2(ω) 价ҧ��� lower sideband �ͧ�ѹ�ͧ������ ������ҧ��鹾ͼ�ҹ standard demodulation �����ѭ�ҳ output �����мԴ���¹ ��ҹ����ҡ��� x̂(n) �Ѻ ŷ(n) ����任�������Ѻ��ǹ������֧��¹�����͢������͡�����Ǥ�Ѻ
�š�÷��ͧ ���������ᵡ��ҧ�ҡ��ú�������˹�ҪѴਹ�Ф�Ѻ �͡�ҡ����ػ���������� CD-based method �ѹ�������ö������ AM ���»��Ȩҡ�����Դ���¹ �Ե�õ㹡�ë������ŷ��������������� 256 bps ��ж�� noise Ŵŧ��ӷ���� SNR > 30 dB ���ѵ� inaudibility �д� ��Фس�Ҿ�ͧ���§Ŵŧ��� b0 �����ҡ��� (b1 = b0 + 0.07)
| Create Date : 27 �á�Ҥ� 2556 | | |
| Last Update : 27 �á�Ҥ� 2556 23:01:03 �. |
| Counter : 1727 Pageviews. |
| |
|
| |
|
|
|
|
 �ҡ��ͤ�����ѧ����
�ҡ��ͤ�����ѧ���� ���Դ������͡ : 85 �� [
���Դ������͡ : 85 �� [




























