|
|
|
| | 1 | 2 | 3 | 4 | 5 |
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | |
|
 |
|
|
������ҧ ���¹���Թ������ Arduino |
|
���¹���Թ������ Arduino ���¹���������������ѡ��÷ӧҹ��������ѹ ��� ˹����Ѻ��������� (Input Unit) ˹��»����ż� (Process Unit) ���˹����ʴ��� (Output Unit) �ѧ��鹡�÷�����¹��������������ç������� ���¹��е�ͧ���ػ�ó���е�Ǩ�ͺ���˹�����觢����ŷ������ѧ˹��»����ż� �������������ӡ���ʴ����¡����ѧ������µ��� �ػ�ó��鹰ҹ�����㹡�õ�Ǩ�ͺ���˹觹�� ��� ������������ʧ����Ѻ��Ǩ�Ѻ�ѵ�ءմ��ҧ
���¹��� �����ҹ IR Infrared Obstacle Avoidance Sensor Module ����������
https://robotsiam.blogspot.com/2016/10/ir-infrared-obstacle-avoidance-sensor.html
������Ẻ�����ժ�ǧ㹡�÷ӧҹ ���� ����㹡�õ�Ǩ�Ѻ����������Ẻ Opposed mode ��������С�÷ӧҹ���� �������բ�� ����Ѻ Receiver ������ö�Ѻ�ѭ�ҳ�ʧ�ҡ����� �Emitter ���ʹ���� ���ͧ�ҡ���ʧ �з���Ѻ���� ���ʴ���� �� 0
��� ����;�����մ� �ʧ�з���Ѻ������� � �֧��������Ѻ Receiver �������ö�Ѻ���ʧ�����з���Ѻ���� ���ʴ���� �� 1
��÷ӧҹ�ͧ ���¹���Թ������ Arduino
�������Ǩ�ͺ����з��ʧ��Ѻ�� ��������� �������ѭ�ҳ��ѧ Arduino Uno R3 ���ǠArduino Uno R3��֧�������������ӧҹ �� Motor Drive Module L298N �����仵������觤���Ңͧ������
��ਤ ���¹���Թ������ Arduino ������� 1 ��� ��Ҩ��� 2 �������Թ����ô ��ʹ�ҹ������д�ҹ��� ��� ����������� ��駴�ҹ������д�ҹ��� ��Ǩ�ͺ�����繾���բ�� ���ʧ ����ö�з���Ѻ�����駤�� �( 0 , 0 ) ������¹���������仢�ҧ˹�� �ҡ����������Ҿ�����մ� ���� �������Ҿ�����բ�� ( 1 , 0 ) ������¹��������价ҧ��ҹ����
�ҡ���������Ҿ�����մ� ���� ��������¾�����բ�� ( 0 , 1 ) ������¹��������价ҧ��ҹ���
�ҡ���������ͧ�����躹����մӷ�駤�� ( 1 , 1 ) ������¹����ش ����ػ �� 4 ���䢷�����¹���Թ������ Arduino �Ѻ��Ҩҡ�����������Т��
��� (0 ,0) | (0 ,1) | (1 , 0) | (1 ,1 ) �ʴ�������ҧ��ҹ��ҧ
| �Թ�ص | ��ҵ�ص | ����������ͧ���¹�� | | ��������� | �������� | ���������
| �������� | | LS | RS | LM1 | LM2 | RM1 | RM2 |
| | 0 | 0 | 0 | 0 | 0 | 0 | �Թ˹�� | | 0 | 1 | 1 | 0 | 0 | 0 | �����Ǣ�� | | 1 | 0 | 0 | 0 | 1 | 0 | �����ǫ��� | | 1 | 1 | 1 | 0 | 1 | 0 | ��ش | ��Ҩ����ҧ ���¹���Թ������ Arduino ��� ��¹�����������䢷���ʴ�㹵��ҧ��ҹ��
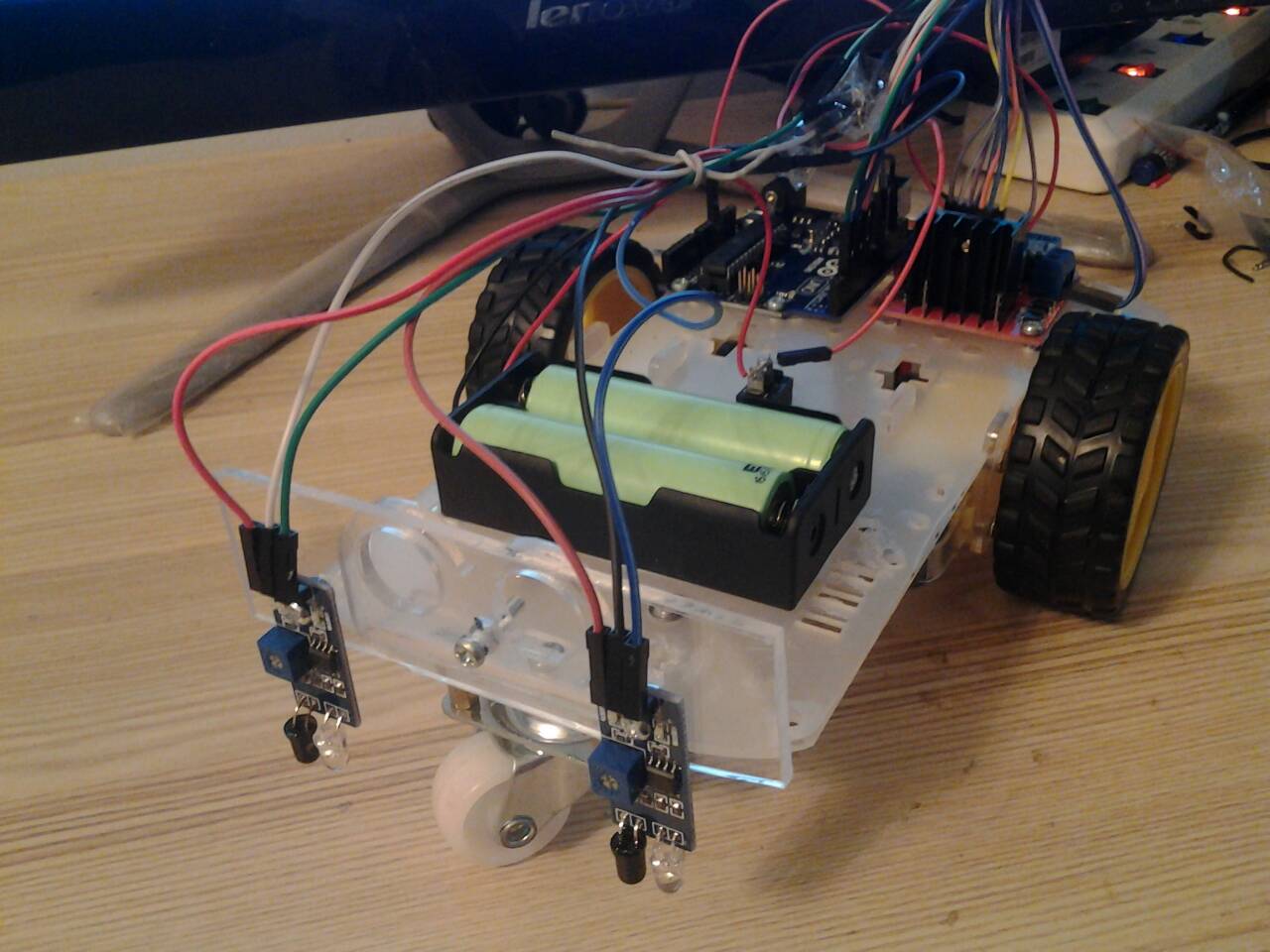
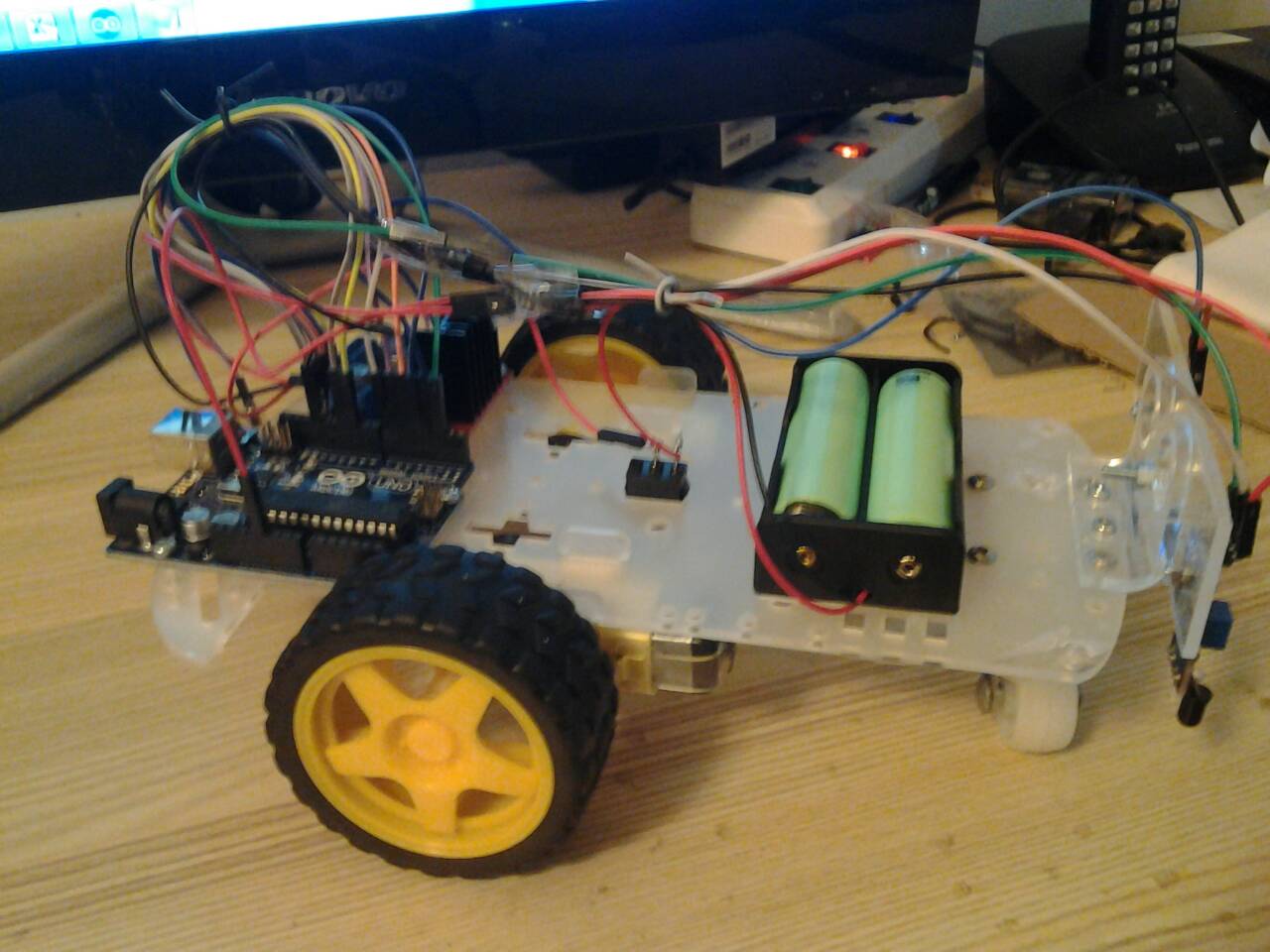
������鹴��¡�� ��Сͺ Smart Robot Car Chassis Kit ���ǧ�� Arduino �UNO �Ѻ L298N �Motor Driver ����ٻ��õ��ǧǧ��
��俨ҡẵ����������� 18650 仵�͵ç�Ѻ L298N �Motor Driver (����͡Ѻ ���� Power Supply �ͧ ���� Arduino �UNO R3 ) ��� ��� 5 ��ŵ� ����͡�ҡ L298N �Motor Driver ����͡�����§ ���� Arduino �UNO R3 ����ٻ��õ��ǧǧ��
���ǧ�� Arduino �UNO �Ѻ IR Infrared Obstacle Avoidance Sensor ����ٻ
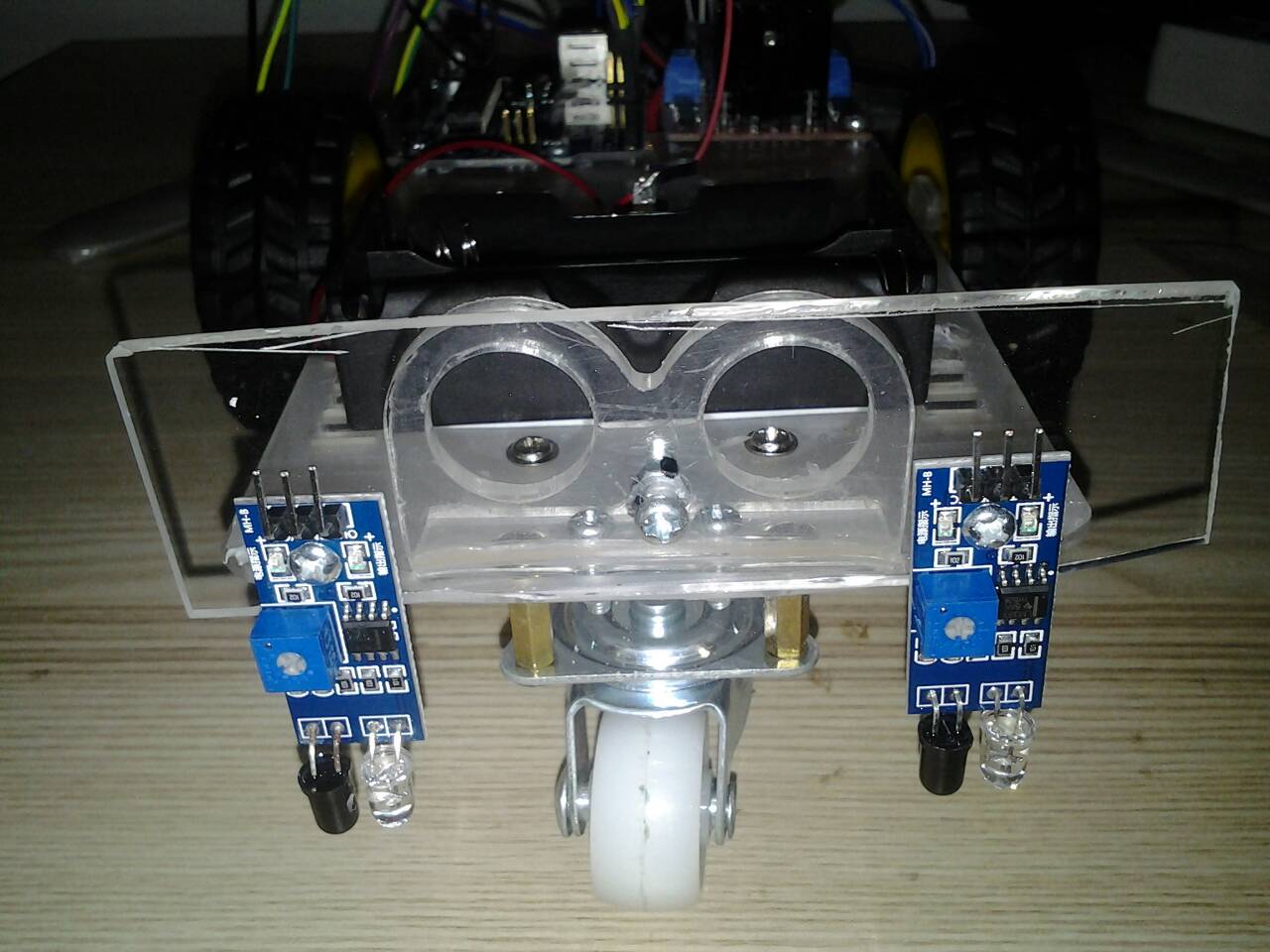
���Ф���Ԥ ��Ҵ 10 x 3 �繵����à��Сͺ ��ҡѺ������������Т��
 �ִ��ҡѺ Mounting Bracket for HC-SR04 Ultrasonic Module Ẻ���

�ִ��ҡѺ ������¹�� 
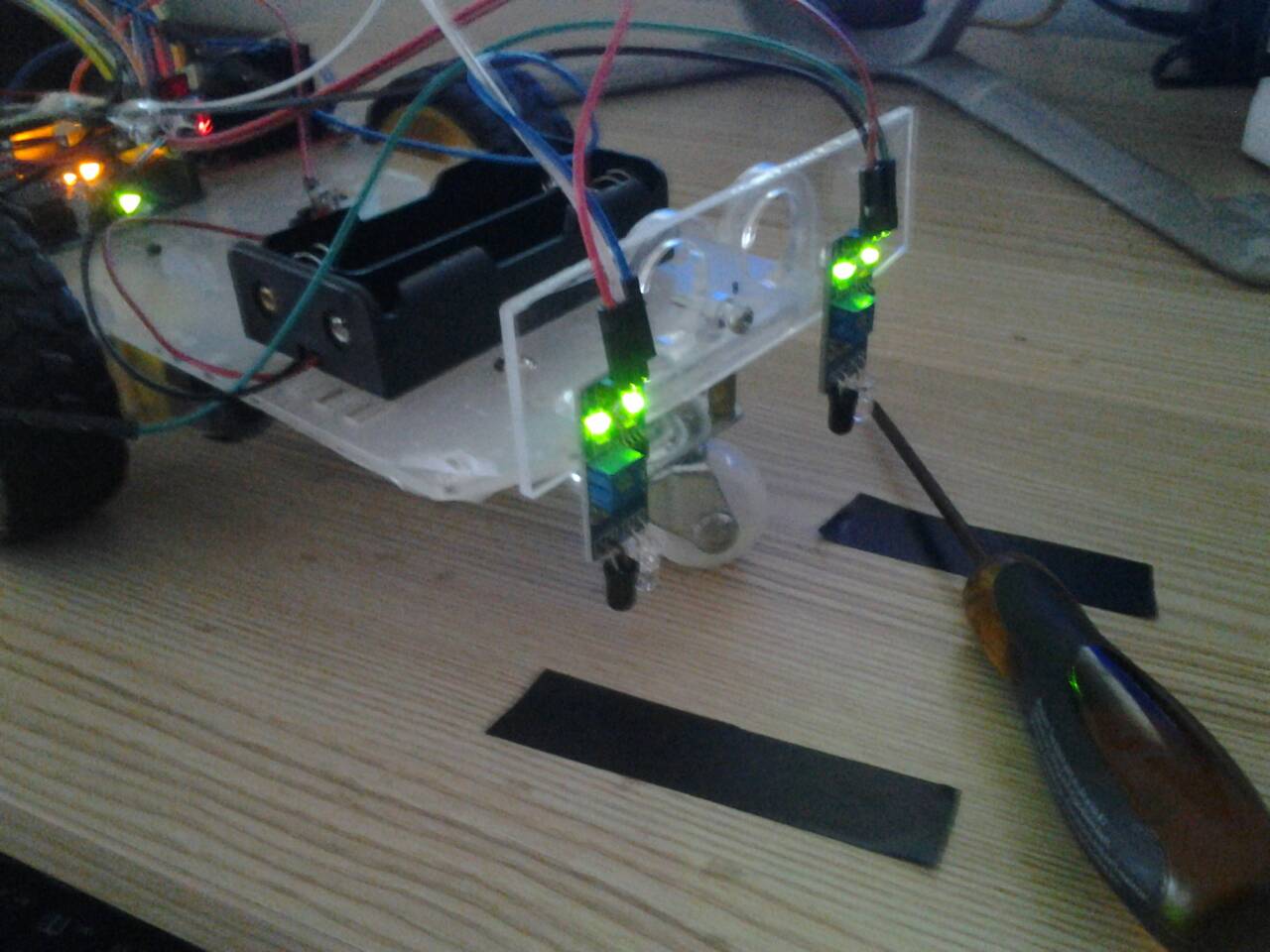
����͵��ǧ�� ���¹���Թ�����鹠���� ������ USB �ҡ���������� ��ҡѺ Arduino �UNO R3 ��Ѻ����С�õ�Ǩ�Ѻ �� ����͠������ �������鹻á�� ���� LED �Դ 2 �ǧ ��� ����� ����㹾�鹷�� �մ� ��� � LED �Դ 1 �ǧ

�Դ����� Arduino (IDE) ��� Upload �鴹�� ��ѧ ���� Arduino UNO R3 �/*-------definning Inputs------*/ int LS = 2; � � // left sensor int RS �= 3; � � �// right sensor
/*-------definning Outputs------*/ int LM1 = 4; � � �// left motor int LM2 = �5; � � � // left motor int RM1 = �6; � � � // right motor int RM2 = �7; � � � // right motor
/*-------PWM �Ǻ�����������������-----*/ int PWM1 = 10; � �// PWM left motor int PWM2 = 11; � �// PWM right motor int SPEED = 90; �// Speed PWM ����ö��Ѻ����������֧ 255
void setup() { � pinMode(LS, INPUT); � pinMode(RS, INPUT); � pinMode(LM1, OUTPUT); � pinMode(LM2, OUTPUT); � pinMode(RM1, OUTPUT); � pinMode(RM2, OUTPUT); � pinMode(PWM1, OUTPUT); � pinMode(PWM2, OUTPUT); }
void loop() {
� if (!(digitalRead(LS)) && !(digitalRead(RS))) � �// Move Forward � { � � analogWrite(PWM1, SPEED); � � digitalWrite(LM1, HIGH); � � digitalWrite(LM2, LOW); � � analogWrite(PWM2, SPEED); � � digitalWrite(RM1, HIGH); � � digitalWrite(RM2, LOW); � }
� if (!(digitalRead(LS)) && digitalRead(RS)) � �// Turn right � { � digitalWrite(LM1, LOW); � � digitalWrite(LM2, LOW); � � analogWrite(PWM2, SPEED); � � digitalWrite(RM1, HIGH); � � digitalWrite(RM2, LOW); � }
� if (digitalRead(LS) && !(digitalRead(RS))) � �// turn left � { � � analogWrite(PWM1, SPEED); � � digitalWrite(LM1, HIGH); � � digitalWrite(LM2, LOW); �digitalWrite(RM1, LOW); � � digitalWrite(RM2, LOW); � }
�if (digitalRead(LS) && digitalRead(RS)) � �// stop � { � � digitalWrite(LM1, LOW); � � digitalWrite(LM2, LOW); � � digitalWrite(RM1, LOW); � � digitalWrite(RM2, LOW); � }
} �մ��ͼ��Ѿ���÷ӧҹ�ͧ ���¹���Թ������ Arduino
| Create Date : 06 ��Ȩԡ�¹ 2559 |
| Last Update : 6 ��Ȩԡ�¹ 2559 11:18:40 �. |
|
0 comments
|
| Counter : 9587 Pageviews. |
 |
|
|
|
|
|
|
|
|