 ��Ѻ���Ѿഷ�ѹ�ա����
��Ѻ���Ѿഷ�ѹ�ա������ѧ�ҡ��ҧ��¡ѹ仹ҹ�Ф�Ѻ �������仹ҹ���������������� �����Թ�ع���ͫ����ػ�ó��ҷ���š��Ը������

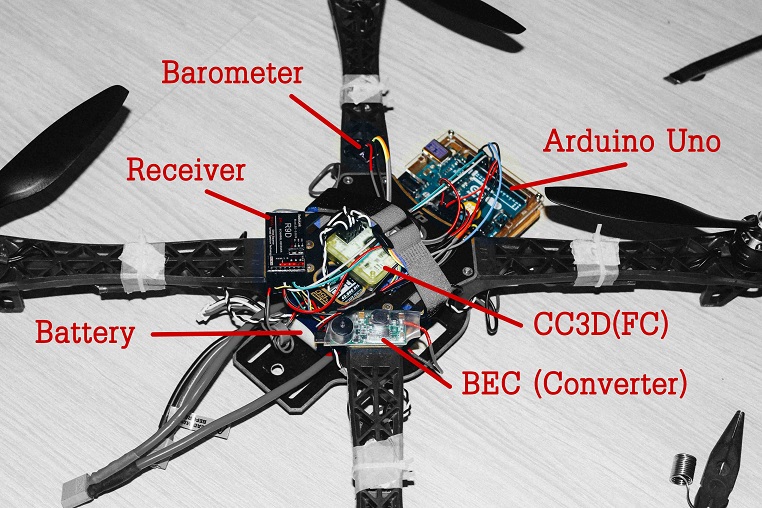
� � � � � ���ѧ�ҡ��Ǣ������ش������� ��͡�÷���������ö�觢����� PWM ���� PPM ��ҹ Arduino ������ CC3D ���� FC ������������������ع������
� � � � � �����Ҽ���Դ��š��Ը������ͷ��з����� Altitude Hold ����� �š��͵Դ�ѭ�� 2-3 ���ҧ����һǴ�������ҡ� ���ѡ���¡���
�ѭ�ҵ��ૹ��������㹡���Ѵ�дѺ�����٧�ͧ�ù (��Ҩ����������ૹ���� made in china ��� 555) ������ਤ������ Digital Barometer (Baro) ����ૹ�����Ѵ�����ѹ�ҡ�� �����Ѵ��Ҥ����ѹ�ҡ�� � �ش����ù������� �����ŧ��˹������� ��������� Altitude (�дѺ�����٧) ���Ѵਹ�͡�� ��觤����٧�����������ҧ���ૹ���������� ��� ���������觷�����¡��Ҥ��������������¤�Ѻ 5555 �ҧ������
�ѡ�ѡ�дѺ�����٧��������������ͧ���� ��������Ŵŧ�������ͧ���� 
(�����૿�ٻ������Ǵ�д�����)
� � � � � ������������Ը���䢻ѭ�ҷ����ҹ���¡�õ������ҹ��ҧ�ҹ� ����㹤����繨�ԧ�����дѺ�����٧�ѹ����ҨФ�Ҵ������Ҵ����ԧ�����Ѻ
� � � � � ��͡���������Ҥ�����ԧ�����ͺ��¹������ͧ ����繻������ͺ Debug �����������������ҡ���� (�ٴ������͡�ͻ�鴢ͧ������������� 5555)
� � � � � ���� ������ҡ��������� Low Pass Filter (LPF) ���价�� Altitude.. �ͧ����¹�鴷����㹡����ҹ��� parameter 㹵��ૹ����.. �ͧ����ૹ�����ա�������.. ���ѧ������ ���֧�ѹ��� Altitude ����Ѵ��㹢�з���ҧૹ����������
�դ�����Ҵ�����������ҳ 20 cm ������������ �������§�ش��ҹ������ ��Сͺ�ѹ��ҡѺ����ù��¡����ǡѹ �

� � � � � ������������ǹ�ͧ���� Altitude Hold ��鹼��ѧ��������� �ѹ��� (�ҷԵ���� 3 �á�Ҥ� 59) ������Ѵ���촡Ѻૹ�����������ù�����ͧ��鹺Թ�١�
�Ť�ͼ�ҹ��Ѻ 
�(������Ѵ��Ի�� ���Ъ�����Ͷ����麹��ͧ���)
to be continued.. �����价�प�!!!
��. �ҡ��ҹ���ҡ���й����ü� ��ú�ǹ�ԭ����������¹Ф�Ѻ :)






 (�����૿�ٻ������Ǵ�д�����)
(�����૿�ٻ������Ǵ�д�����) 


 �ҡ��ͤ�����ѧ����
�ҡ��ͤ�����ѧ���� ���Դ������͡ : 1 �� [
���Դ������͡ : 1 �� [